Yantar
Updated: Original article 9th Oct. 2016.
![]() Russian ship loitering near undersea cables
Russian ship loitering near undersea cables
This article would not be possible without info from unnamed others. All info presented based on analysis of Open Sources. Special thanks to Steffan Watkins (Twitter). Any errors are solely the responsibility of the author. Feedback and further info welcome.

![]()
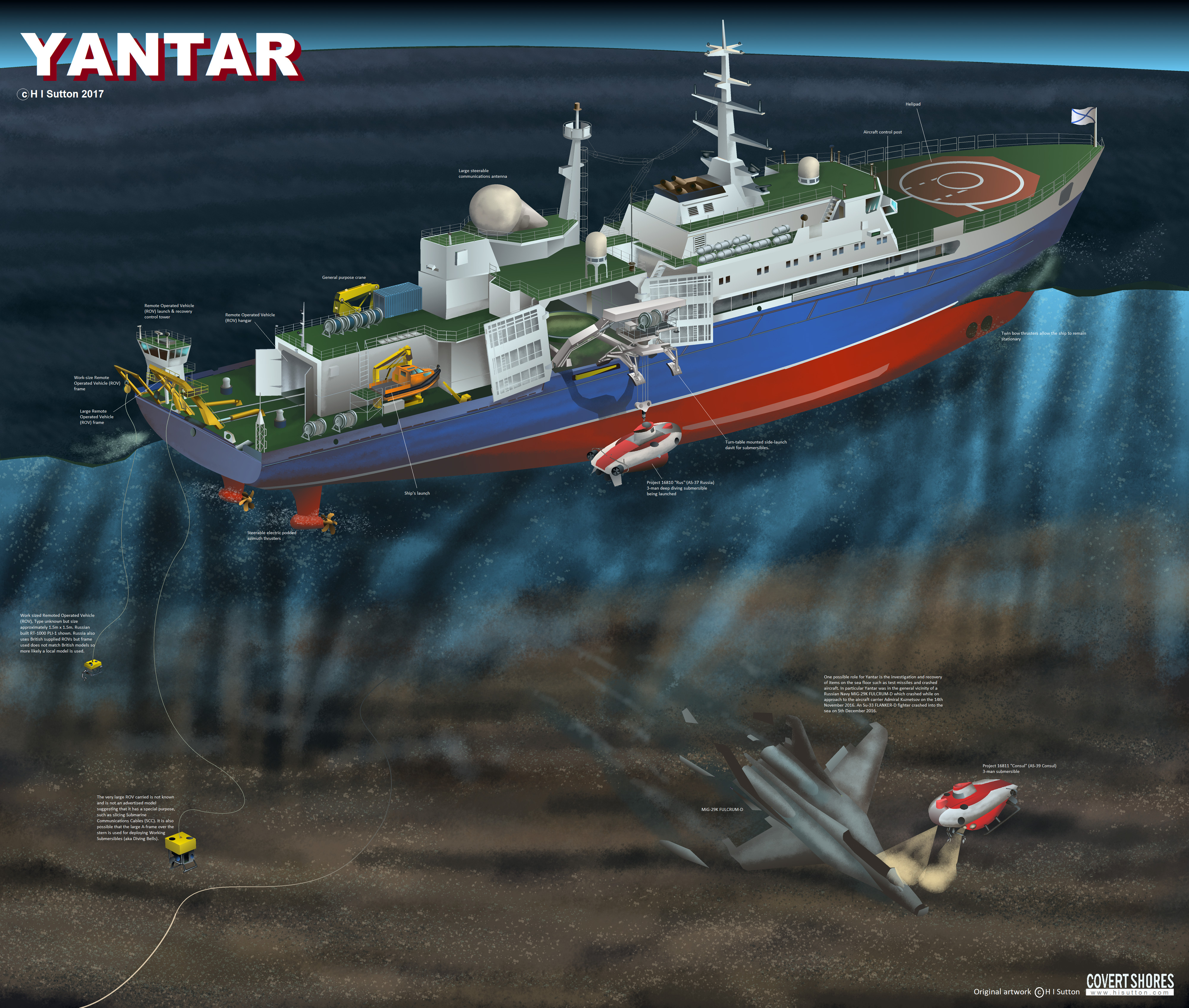
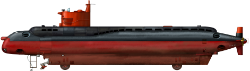
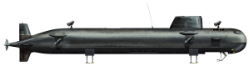
 The Russian Navy’s Project 22010 mini-sub host ship Yantar is known for loitering near undersea internet cables (known as Submarine communications Cables - SCC). Yantar is operated by Russia’s secretive Main Directorate of Underwater Research (GUGI) who operate many of Russia’s special mission (spy) submarines.
The Russian Navy’s Project 22010 mini-sub host ship Yantar is known for loitering near undersea internet cables (known as Submarine communications Cables - SCC). Yantar is operated by Russia’s secretive Main Directorate of Underwater Research (GUGI) who operate many of Russia’s special mission (spy) submarines.
Yantar (actually Cruys) was launched in 2014 and joined the Russian Navy in 2015. It is described variously as a ‘Special Purpose Ship’ and an ‘Oceanographic vessel’ which is a euphemism for a spy ship. She can host two deep submergence submarines for undersea engineering missions. These missions are thought to include cable cutting, laying of taps on undersea cables, removing other countries’ taps (‘delousing’) and related intelligence missions. She may also perform other special missions such as recovery of sensitive equipment from crashed aircraft or test missiles.
In September 2015 Yantar caused concern in Intelligence and Naval circles when she hung around off the US coast on its way to Cuba where undersea cables land near Guantánamo Bay. (Ref. New York Times).
In December 2015 Yantar deployed its pr.16810 “Rus” (AS-37 Russia) deep diving submersible in the mid-Atlantic, reaching a depth of 6,180 meters (20,275 ft). The three-man crew (‘Hydronauts’) on the dive were Yuri Kurganov, Dmitry Boev and Mikhail Kuzmichev.
Original artwork: CLICK for HIGH RESOLUTION:
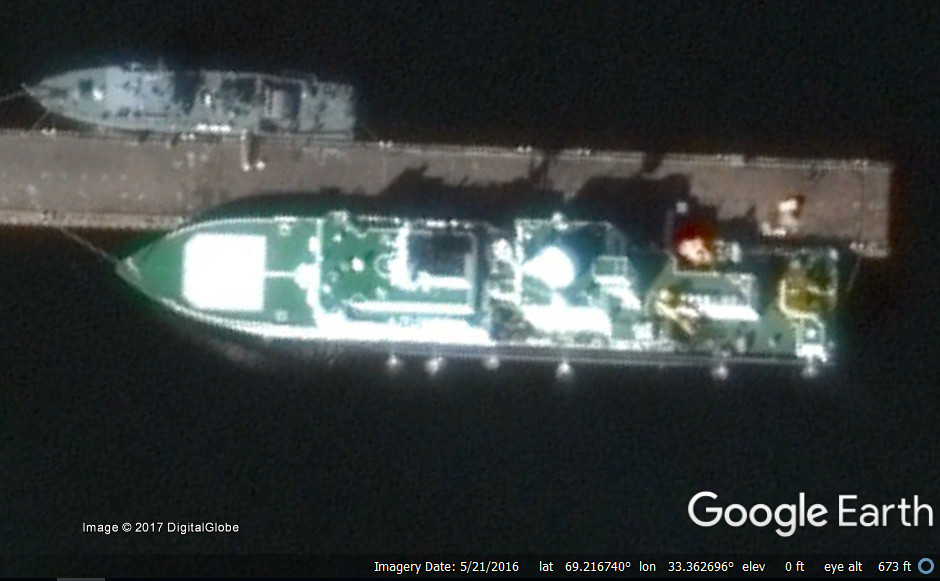
Yantar seen at GUGI’s base at Olenya Guba near the Arctic.
Get The essential guide to World Submarines
This Covert Shores Recognition Guide Covers over 80 classes of submarines including all types currently in service with World Navies.
Check it out on Amazon
Another possible role for Yantar is the investigation and recovery of items on the sea floor such as test missiles and crashed aircraft. In particular Yantar was in the general vicinity of a Russian Navy MiG-29K FULCRUM-D which crashed while on approach to the aircraft carrier Admiral Kuznetsov on the 14th November 2016. An Su-33 FLANKER-D fighter crashed into the sea on 5th December 2016. Admiral Kuznetsov operated in the Eastern Mediterranean from early November 2016 until early January 2016, launching offensive missions over Syria. Her Su-33 and MiG-29 jets were deployed to land bases in Syria for some of this time.

MiG-29K FULCRUM-D (left) and Su-33 FLANKER-D jets aboard Admiral Kuznetsov during Syrian operations, 2016.
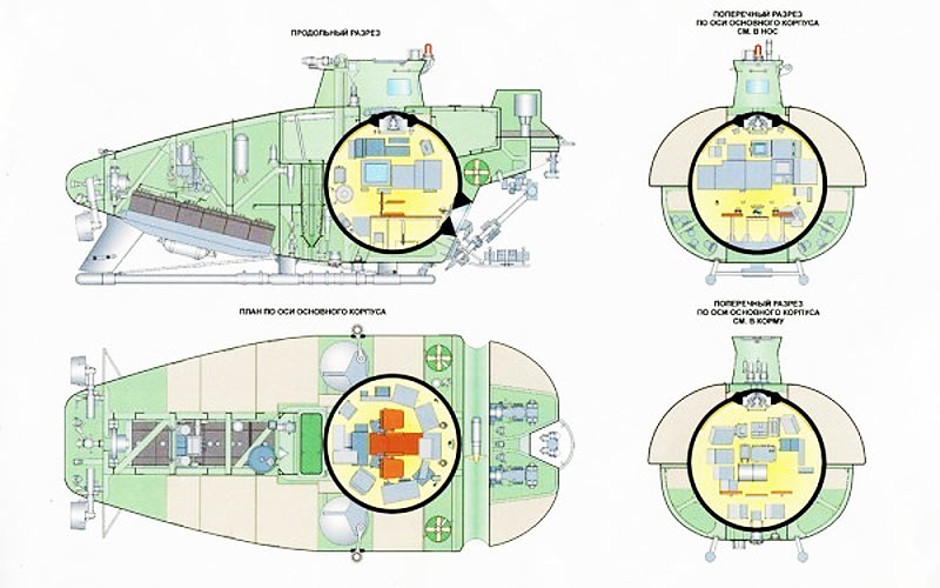
Submersibles
The two submersibles are the 3-man pr.16810 “Rus” (AS-37 Russia) and pr.16811 “Consul” (AS-39 Consul) which can dive to 6,000m (20,000ft). The crew are housed in a strong spherical chamber in the center and it is equipped with hydraulic manipulators.

AS-37 Russia
AS-39 Consul


Yantar is equipped with a massive hangar on the starboard side which launches vehicles over the side. CLICK for HIGH RESOLUTION:

Turntable mounted side launching arm for mini-subs:
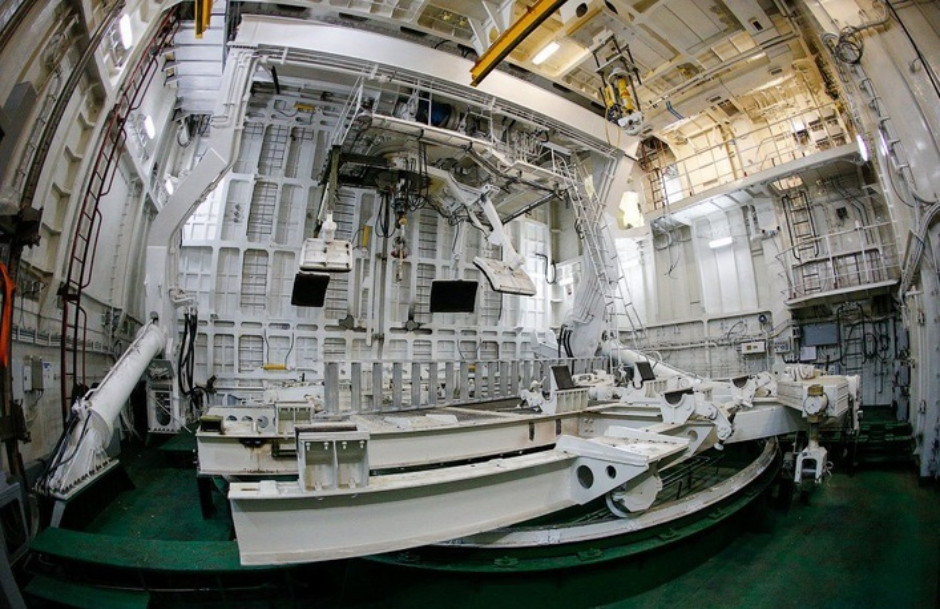
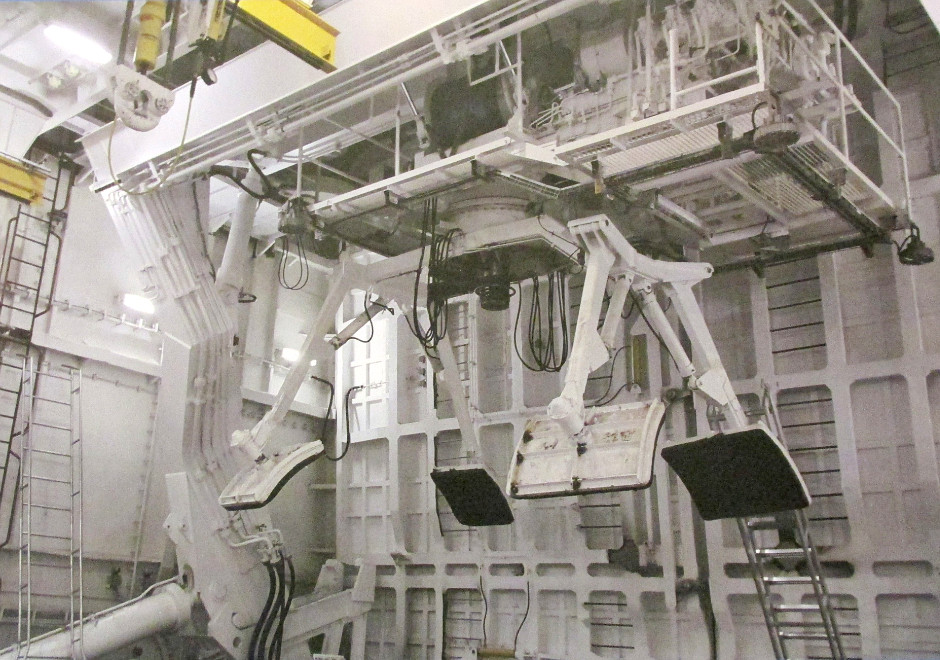

The mini-sub shown is AS-39 Consul:

ROVs, AUVs, DSVs
Yantar is also equipped with large Remote Operated Vehicles (ROVs), and likely with towed sonar and Autonomous Underwater Vehicles (AUVs).

The ROVs are stored in a hangar and are launched and retrieved over the stern of Yantar. Photographed by Alper Boler, Twitter.
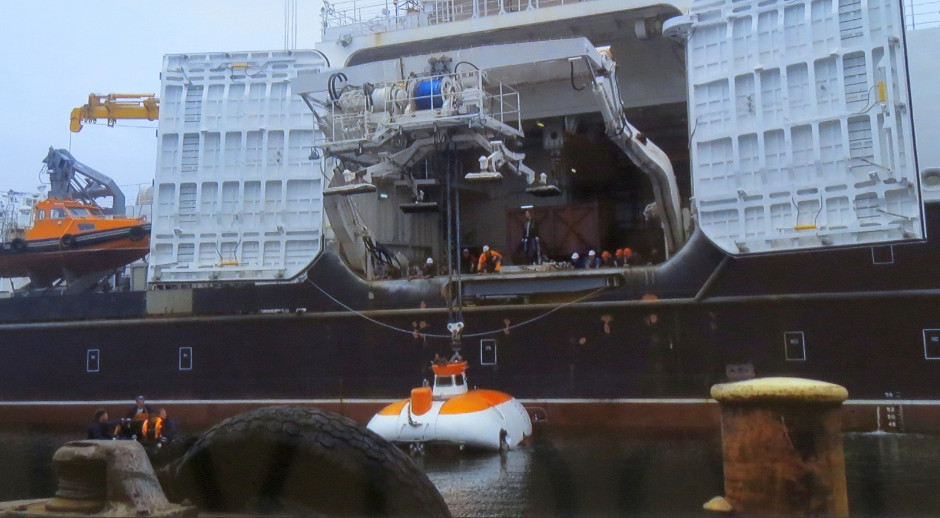
There are two A-frames which swing out over the stern. The large central can also be used for hauling shipping containers onboard and possibly for Working Submersibles (aka Diving Bells). The very large ROV carried is not known and is not an advertised model suggesting that it has a special purpose, such as slicing Submarine Communications Cables (SCC).

The larger central frame can be used to deploy large Russian-made ROVs and for placing or retrieving sea-floor items:

One possibility is that the Yantar has been used to deploy the ARS-600 (ACP-600) deep diving manned submersible, the Russian version of the Canadian Deep Worker design from Nuytco Research. The relatively compact vehicle comes in one and two crew versions and is similar in some respects to the atmospheric diving suits used by divers. Its compact size and light weight (bout two tons) makes it a good candidate for the large stern A-frame. It can operate at 600 meters (1,970 ft) with a maximum depth of 1,000 meters (3,300 ft), which takes it just 20 minutes to descend or ascend (30 minutes from 1,000 meters).

ARS-600 comes in one and two-person versions. Note the shipping containers.
Circumstantial evidence of Yantar carrying blue shipping containers supports this:

A close-up of a shipping container on Yantar. Note the openings in the sides. Credit Yörük Işık, Twitter
Yantar has also been seen on multiple occasions with shipping containers which do not match the ones seen with ARS-60. It is also probable that some of the containers contain diving stores ad support equipment:

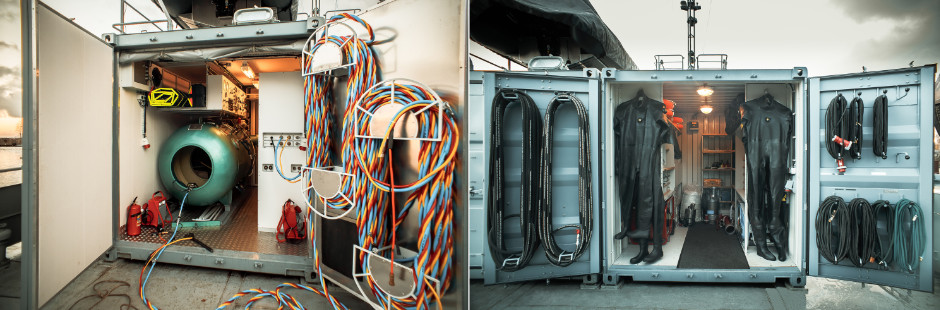
The green cylinder in the left image is a hyperbolic chamber for diver decompression. Unlike the Project 21300 Igor Belousov rescue ship, Yantar does not appear to have integral decompression chambers below the main hangar.
On the stern, on the port side, there is a smaller A-frame for launching and recovering a work-sized Remote Operated Vehicle (ROV). The type unknown but size approximately 1.5m x 1.5m. Russia uses British supplied ROVs but frame used does not match British models so more likely a local model is used, such as the Russian built RT-1000 PLI-1.
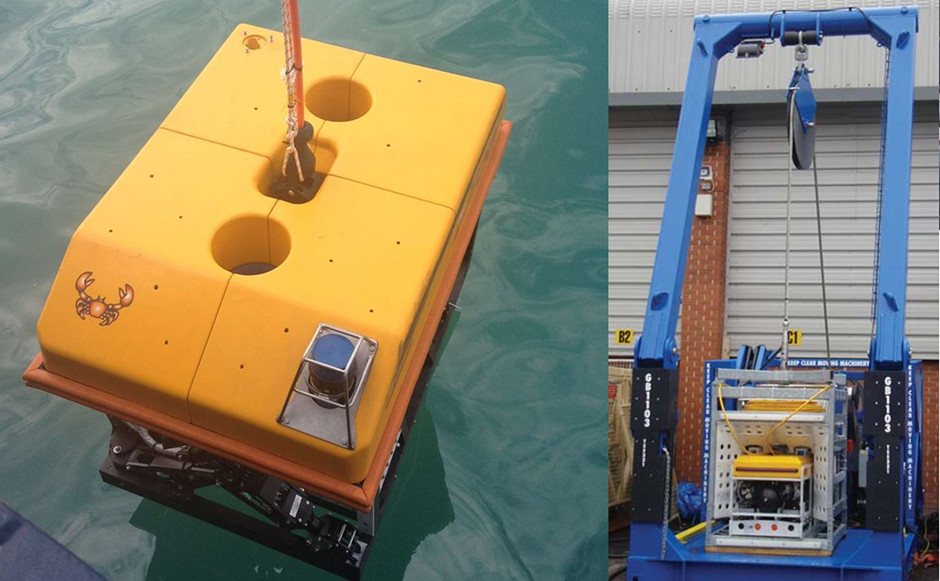
Russian designed RT-1000 PLI-1 (left) and British Saab Seaeye Tiger ROVs (right).
Construction

Yantar can hold position by using her steerable azimuth thrusters. She is also equipped with twin bow thrusters.

Learn EVERYTHING about Special Forces subs** Covert Shores** 2nd Edition. A world history of naval Special Forces, their missions and their specialist vehicles. SEALs, SBS, COMSUBIN, Sh-13, Spetsnaz, Kampfschwimmers, Commando Hubert, 4RR and many more.
Check it out on Amazon
Oct-Dec 2016 deployment
On October 3rd 2016 Yantar passed south through the Bosporus with a declared destination of Oman. However, she has been loitering in the Eastern Mediterranean in the vicinity of the undersea cables connecting Turkey and Northern Cyprus.
Yantar photographed heading south through the Bosphorus on 3rd October. Credit Yörük Işık, Twitter. CLICK for HIGH RESOLUTION:


Credit Alper Boler, Twitter. CLICK for HIGH RESOLUTION:

She left the area of Turcyos-2 cable early on 10th October 2016 and headed south toward IMEWE cable where she arrived at 1700hrs UTC and held station. She searched there until 16th-17th when she moved north again to the vicinity of the UGARIT undersea cable between Syria and Cyprus:
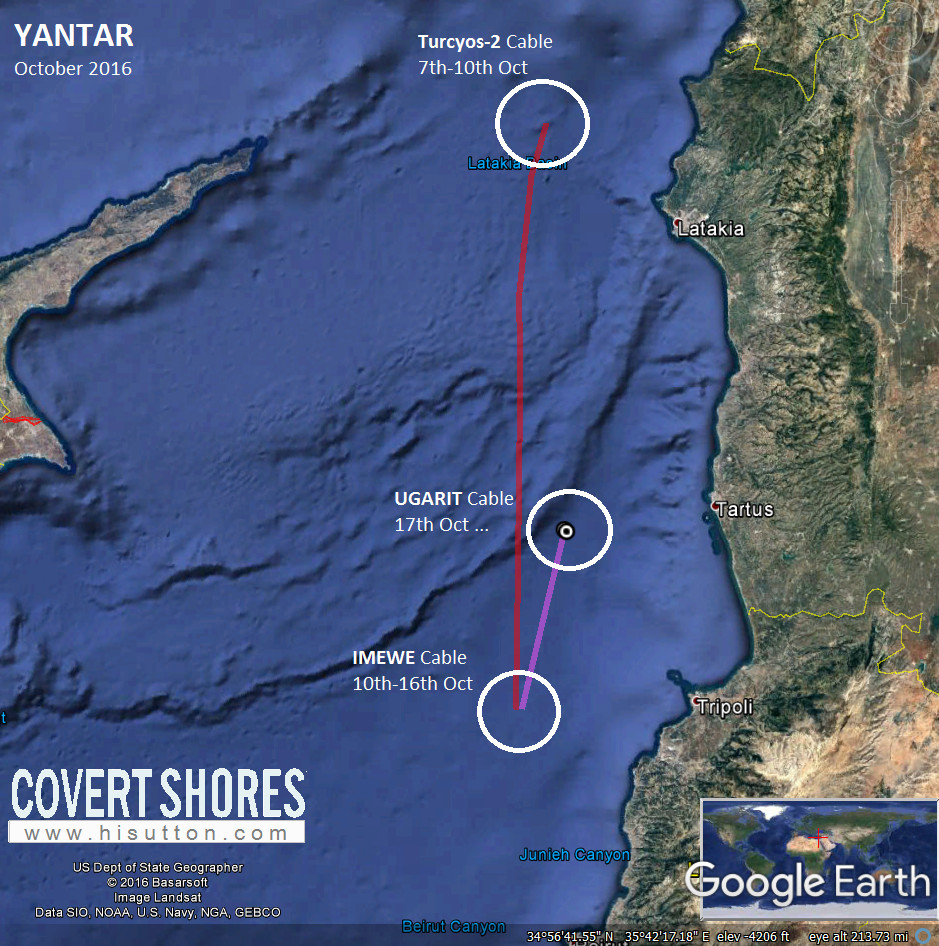
View plots with cable overlays: Steffan Watkins HERE

The earlier position off Turkey:

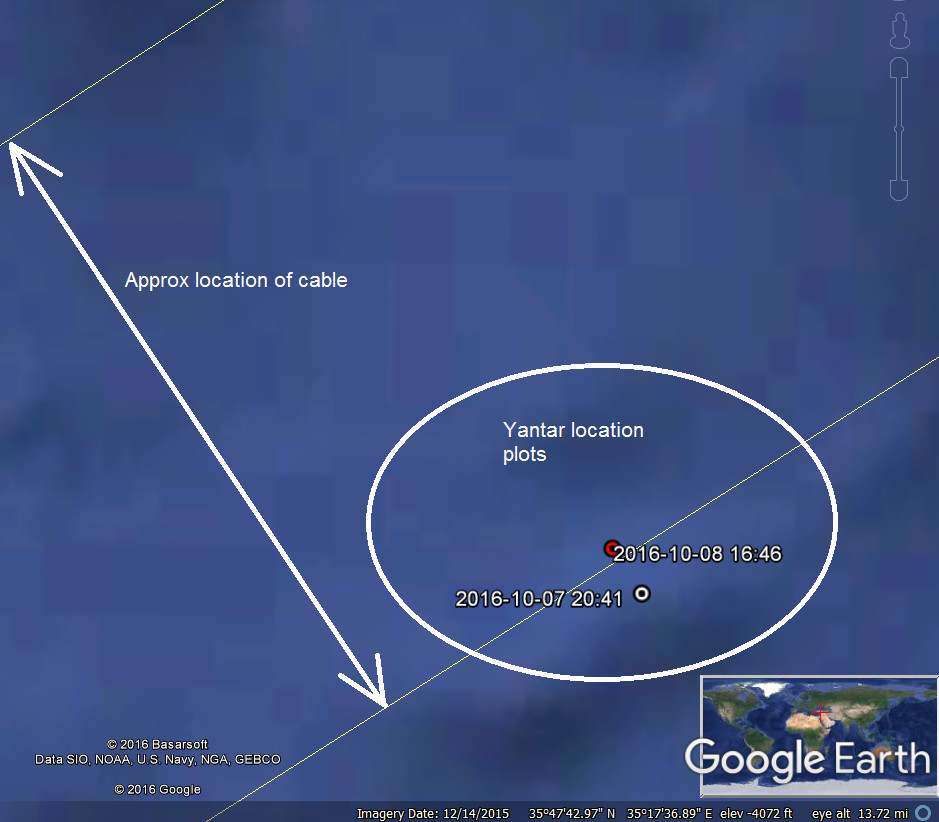

Map source http://www.submarinecablemap.com

Position data from Steffan Watkins (Twitter)

She has made a series of extremely slow parallel runs on approximately a NNE-SSW line. These runs are usually at less than 1kt which is far slower than would be required for towed sonar. Additionally they are usually preceded by lengthy pauses suggesting a comparatively large vehicle being put into the water. And the ship often remains stationary for very long periods suggesting maintenance, or that the hosted craft (mini-sub or ROV) is active on the sea floor in a single position. Or is rising or sinking very slowly.


Related Articles

 USS Jimmy Carter (SSN-23)
USS Jimmy Carter (SSN-23)
 USS Parche spy sub par-excellence
USS Parche spy sub par-excellence
 BS-64 Podmoskovye Special Mission (spy) Host Submarine
BS-64 Podmoskovye Special Mission (spy) Host Submarine
 Project 09852 Belgorod Special Mission submarine (spy sub)
Project 09852 Belgorod Special Mission submarine (spy sub)
 P.09851 KHABAROVSK and KANYON (Status-6)
P.09851 KHABAROVSK and KANYON (Status-6)
 Russian unbuilt spy submarine MPS
Russian unbuilt spy submarine MPS

 Project 1910 UNIFORM Class deep diving spy sub
Project 1910 UNIFORM Class deep diving spy sub